本文共 931 字,大约阅读时间需要 3 分钟。
在上一篇文章中,我主要介绍了。在了解了增强学习的基本思想后,我们便可以继续讨论“最优策略”的求解方法:
我们之前已经说到了MDP可以表示成一个元组(X, A, Psa, R),我们对最优策略的求解方法自然也就与这个元组密切相关:如果该过程的四元组均为已知,我们称这样的模型为“模型已知”,对这种已知所有环境因素的学习称为“有模型学习”(model-basedlearning);与之对应的就是“无模型学习”,环境因素机器无法得知的,主要是指状态转移概率Pxa。
本篇博客对“有模型学习”的两种方法进行介绍,分别是策略迭代和值迭代。在此之前,我们需要明确增强学习的两大步骤,策略评估与策略改进:
策略评估:
在上一篇博客中,我们已经对“状态值函数”和“状态动作值函数”进行了简单介绍,但在之前的考虑中,我们是认为策略已知,故在贝尔曼方程中没有考虑策略π的取值与改进问题。我们在此以“状态值函数”和“状态动作值函数”的T步累积奖赏为例重新进行完整的推导:
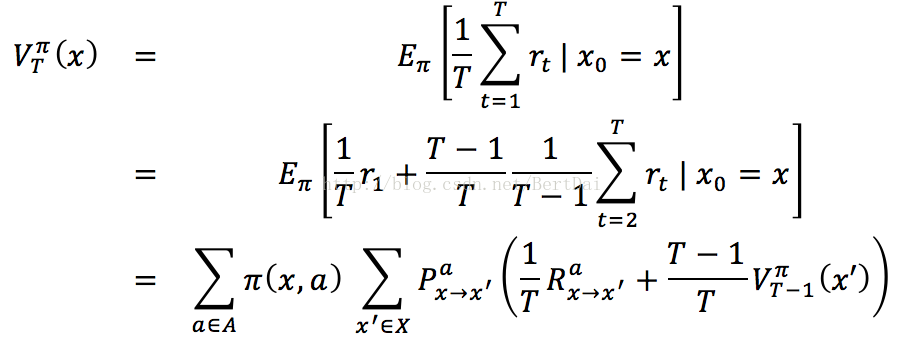
关于下标,Rax->x’表示的是在x状态下采取a动作,转移到x’状态后得到的回报,其他的类比即可。同理可以得到关于“状态动作值函数”Q的公式:

这样的递归式才是对于完整的MDP四元组的贝尔曼等式。也就是说,我们通过这两个公式,就可以通过逐步递归的方式,在编程上实现对策略π的评估。伪代码如下:
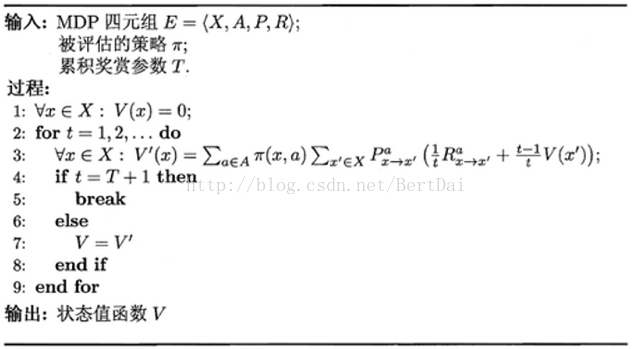
策略改进:
由于我们已经知道了怎样对策略进行评估,那么,我们可以产生一个很直接的求解最优策略的方法:从一个初始化的策略出发,先进行策略评估,然后改进策略,评估改进的策略,再进一步改进策略……不断迭代更新,直达策略收敛,这种做法被称为“策略迭代”,伪代码如下:

其中,Q的计算是根据公式(2)来进行的。
此外,我们不难理解,当Qπ(x,π’(x))>=Vπ(x)时,我们可以认为在x的状态下,π’策略相比原来的策略更好。再结合上一篇博文中的最优贝尔曼方程,我们可以将策略的改进视为值函数的改善,以此得出“值迭代”方法,伪代码如下:
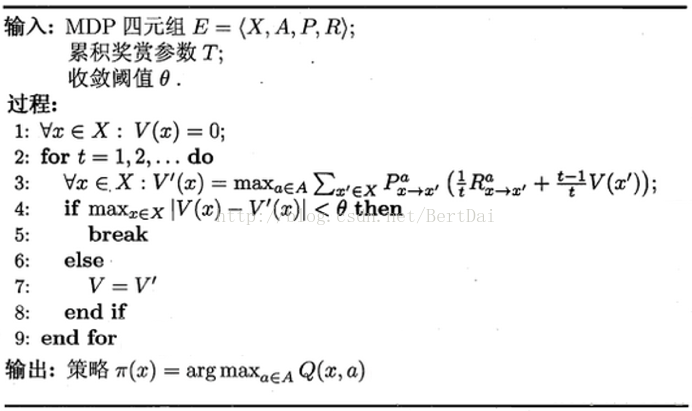
但是,这两种方法的缺点显而易见:必须知道状态转移概率才能进行最优策略的计算。这在我们真实的使用场景中几乎不可能实现,所以,我们将在下一篇中介绍适用性更强的“无模型学习”。